Advanced Machine Learning
12: Kernel Density Estimation
Schedule (you are here )
| # | date | topic | description |
|---|---|---|---|
| 1 | 25-Aug-2025 | Introduction | |
| 2 | 27-Aug-2025 | Foundations of learning | Drop/Add |
| 3 | 01-Sep-2025 | Labor Day Holiday | Holiday |
| 4 | 03-Sep-2025 | Linear algebra (self-recap) | HW1 |
| 5 | 08-Sep-2025 | PAC learnability | |
| 6 | 10-Sep-2025 | Linear learning models | |
| 7 | 15-Sep-2025 | Principal Component Analysis | Project ideas |
| 8 | 17-Sep-2025 | Curse of Dimensionality | |
| 9 | 22-Sep-2025 | Bayesian Decision Theory | HW2, HW1 due |
| 10 | 24-Sep-2025 | Parameter estimation: MLE | |
| 11 | 29-Sep-2025 | Parameter estimation: MAP & NB | finalize teams |
| 12 | 01-Oct-2025 | Logistic Regression | |
| 13 | 06-Oct-2025 | Kernel Density Estimation | |
| 14 | 08-Oct-2025 | Support Vector Machines | HW3, HW2 due |
| 15 | 13-Oct-2025 | * Midterm | Exam |
| 16 | 15-Oct-2025 | Matrix Factorization | |
| 17 | 20-Oct-2025 | * Mid-point projects checkpoint | * |
| 18 | 22-Oct-2025 | k-means clustering |
| # | date | topic | description |
|---|---|---|---|
| 19 | 27-Oct-2025 | Expectation Maximization | |
| 20 | 29-Oct-2025 | Stochastic Gradient Descent | HW4, HW3 due |
| 21 | 03-Nov-2025 | Automatic Differentiation | |
| 22 | 05-Nov-2025 | Nonlinear embedding approaches | |
| 23 | 10-Nov-2025 | Model comparison I | |
| 24 | 12-Nov-2025 | Model comparison II | HW5, HW4 due |
| 25 | 17-Nov-2025 | Model Calibration | |
| 26 | 19-Nov-2025 | Convolutional Neural Networks | |
| 27 | 24-Nov-2025 | Thanksgiving Break | Holiday |
| 28 | 26-Nov-2025 | Thanksgiving Break | Holiday |
| 29 | 01-Dec-2025 | Word Embedding | |
| 30 | 03-Dec-2025 | * Project Final Presentations | HW5 due, P |
| 31 | 08-Dec-2025 | Extra prep day | Classes End |
| 32 | 10-Dec-2025 | * Final Exam | Exam |
| 34 | 17-Dec-2025 | Project Reports | due |
| 35 | 19-Dec-2025 | Grades due 5 p.m. |
Outline for the lecture
- Density estimation
Density estimation
bayesian decision boundary
- If $\prob{P}{\omega_1|\vec{x}} \gt \prob{P}{\omega_2|\vec{x}}$, decide $\omega_1$
- If $\prob{P}{\omega_1|\vec{x}} \lt \prob{P}{\omega_2|\vec{x}}$, decide $\omega_2$
- $\prob{P}{error|\vec{x}} = \min[\prob{P}{\omega_1|\vec{x}}, \prob{P}{\omega_2|\vec{x}}]$
- $\prob{P}{\omega_1|\vec{x}} = \prob{P}{\omega_2|\vec{x}}$ decision boundary
- $\log\frac{\prob{P}{\omega_1|\vec{x}}}{\prob{P}{\omega_2|\vec{x}}} = 0$

If we know posteriors exactly, this the optimal strategy!
Non-parametric density estimation
We have assumed that either
- The likelihoods $\prob{P}{\vec{x}|\omega_k}$ were known (likelihood ratio test), or
- At least their parametric form was known (parameter estimation)
What if all that we have and know is the data?
Ooh! Howchallengingexciting!

Histogram
The simplest form of non-parametric density estimation
- Divide the sample space into a number of bins;
- Approximate the
density by the fraction of training
data points that fall into each bin
$$\prob{P}{\vec{x}} = \frac{1}{N}\frac{\text{# of } \vec{x}^i \text{ in the same bin as }\vec{x}}{\text{bin width}}$$
- Need to define: bin width and first bin starting position
-

Histogram is simple but problematic
- The density estimate depends on the starting bin position
- The discontinuities of the estimate are only an artifact of the chosen bin locations
- The curse of dimensionality, since the number of bins grows exponentially with the number of dimensions
- Unsuitable for most practical applications except for quick visualizations in one or two dimensions
- Let's leave it alone!
Non-parametric DE
general formulation
What we are trying to accomplish?
- The probability that $\vec{x}\sim \prob{P}{\vec{x}}$, will fall in a given region $\cal R$ of the sample space is \[ \theta = \int_{\cal R} \prob{P}{\vec{x}^{\prime}}d\vec{x}^{\prime} \]
- Probability that $k$ of $N$ drawn vectors $\{\vec{x}^1, \dots, \vec{x}^N\}$ will fall in region ${\cal R}$ is \[ \prob{P}{k} = {N \choose k} \theta^k (1 - \theta)^{N-k} \]
- From properties of the binomial pmf
$\prob{E}{\frac{k}{N}} = \theta$ $\prob{var}{\frac{k}{N}} = \frac{\theta(1-\theta)}{N}$ - As $N\rightarrow\infty$, variance reduces and we can obtain a good estimate from $ \theta \simeq \frac{k}{N} $
Non-parametric DE
general formulation
- Assume $\cal R$ is so small that $\prob{P}{\vec{x}}$ does not much vary across it \[ \theta = \int_{\cal R} \prob{P}{\vec{x}^{\prime}}d\vec{x}^{\prime} \simeq \prob{P}{\vec{x}}V \]
- Combining with $\theta \simeq \frac{k}{N}$ \[ \prob{P}{x} \simeq \frac{k}{NV} \]
-
We obtain a more accurate estimate increasing $N$ and shrinking $V$
practical considerations
- As $V$ approaches zero ${\cal R}$ encloses no examples
- Have to find a compromise for $V$
- The general expression of nonparametric density becomes
\[ \prob{P}{x} \simeq \frac{k/N}{V} \mbox{, where } \begin{cases} V & \text{volume surrounding } \vec{x} \\ N & \text{total #examples}\\ k & \text{#examples inside } V \end{cases} \]
- For convergence of the estimator we need to provide for:
\begin{align} &\underset{n\to\infty}{\lim} V = 0\\ &\underset{n\to\infty}{\lim} k = \infty\\ &\underset{n\to\infty}{\lim} k/N = 0\\ \end{align}
Two approaches that provide this
- Fix $V$ and estimate $k$ - kernel density estimation (KDE)
- Fix $k$ and estimate $V$ - k-neares neighbor (kNN)

Parzen windows
- Assume, the region $\cal R$ enclosing $k$ examples is a hypercube with the side of length $h$ centered at $\vec{x}$
- Its volume is $V = h^d$, where $d$ is the dimensionality
- To find the number of examples that fall within this region we define a window function $K(u)$ (a.k.a. kernel) \[ \prob{K}{u} = \begin{cases} 1 & |u_j| \lt \frac{1}{2} \forall j = 1\dots d\\ 0 & \text{otherwise} \end{cases} \]
- Known as a Parzen window or the naïve estimator and corresponds to a unit hypercube centered at the origin
- $\prob{K}{\frac{(\vec{x} - \vec{x}^n)}{h}} = 1$ if $\vec{x}^n$ is inside a hypercube of side $h$ centered on $\vec{x}$, and zero otherwise

Parzen windows
- The total number of points inside the hypercube is \[ k = \sum_{n=1}^N \prob{K}{\frac{\vec{x} - \vec{x}^n}{h}} \]
- The density estimate becomes \[ \prob{P$_{KDE}$}{\vec{x}} = \frac{1}{Nh^d} \sum_{n=1}^N \prob{K}{\frac{\vec{x} - \vec{x}^n}{h}} \]

Note, Parzen window resembles histogram but with the bin location determined by the data
Parzen windows
- What's the role of the kernel function?
- Let us compute the expectation of the estimate $\prob{P$_{KDE}$}{\vec{x}}$ \begin{align} E\left[\prob{P$_{KDE}$}{\vec{x}}\right] &= \frac{1}{Nh^d} \sum_{n=1}^N E\left[\prob{K}{\frac{\vec{x} - \vec{x}^n}{h}}\right]\\ & = \frac{1}{h^d} E\left[ \prob{K}{\frac{x-x^\prime}{h}}\right]\\ & = \frac{1}{h^d} \int \prob{K}{\frac{x-x^\prime}{h}} \prob{P}{x^\prime}dx^\prime\\ \end{align}
- $\prob{P$_{KDE}$}{\vec{x}}$ is a convolution of the true density with the kernel function
- As $h\to 0$, the kernel approaches Dirac delta and $\prob{P$_{KDE}$}{\vec{x}}$ approaches true density
\[ \prob{P$_{KDE}$}{\vec{x}} = \frac{1}{Nh^d} \sum_{n=1}^N \prob{K}{\frac{\vec{x} - \vec{x}^n}{h}} \]
\[ \prob{K}{u} = \begin{cases} 1 & |u_j| \lt \frac{1}{2} \forall j = 1\dots d\\ 0 & \text{otherwise} \end{cases} \]
Exercise
- Given dataset $X = \{4, 5, 5, 6, 12, 14, 15, 15, 16, 17\}$ use Parzen windows to estimate the density at $y=3,10,15$; use $h=4$
-

- Let's estimate $\prob{P}{y=3}$ $$ \frac{1}{10\times 4^1} \left[ \prob{K}{\frac{3-4}{4}} + \prob{K}{\frac{3-5}{4}} + \cdots +\prob{K}{\frac{3-17}{4}}\right] = \frac{1}{40} = 0.025 $$
- $ \prob{P}{y=10} = \frac{1}{10\times 4^1} \left[ 0 + 0 + 0 + 0 + 0 + 0 + 0 + 0 + 0 + 0\right] = \frac{0}{40} = 0 $
- $ \prob{P}{y=15} = \frac{1}{10\times 4^1} \left[ 0 + 0 + 0 + 0 + 0 + 1 + 1 + 1 + 1 + 0\right] = \frac{4}{40} = 0.1 $
Smooth kernels
- The Cube window has a few drawbacks
- Yields density estimates that have discontinuities
- Weights equally all points $\vec{x}_i$, regardless of their distance to the estimation point $\vec{x}$
- Often a smooth kernel is preferred
- $\prob{K}{\vec{x}} \ge 0$
- $\displaystyle\int_{\cal R} \prob{K}{\vec{x}}d\vec{x} = 1$
- Usually, radially symmetric and unimodal, i.e. $\prob{K}{\vec{x}} = (2\pi)^{-d/2}e^{-\frac{1}{2}\vec{x}^T\vec{x}}$
- Just use it in our density estimator:
$$ \prob{P$_{KDE}$}{\vec{x}} = \frac{1}{Nh^d} \sum_{n=1}^N \prob{K}{\frac{\vec{x} - \vec{x}^n}{h}} $$ 

Interpretation
- The smooth kernel estimate is a sum of "bumps"
- The kernel function determines the shape of the bumps
- The parameter $h$, "smoothing parameter" determines their width
-

Prior knowledge vs data
bandwidth selection
- Large $h$ over-smoothes the DE hiding structure
- Small $h$ yields a spiky uninterpretable DE

bandwidth selection
- Pick $h$ that minimizes the error between the estimated density and the true density
- Let us use MSE for measuring this error
- $E\left[ (\prob{P$_{KDE}$}{\vec{x}} - \prob{P}{\vec{x}})^2 \right] $
- $ = E\left[ \prob{P$_{KDE}$}{\vec{x}}^2 - 2 \prob{P$_{KDE}$}{\vec{x}} \prob{P}{\vec{x}} + \prob{P}{\vec{x}}^2\right]$
- $ = E\left[ \prob{P$_{KDE}$}{\vec{x}}^2\right] - 2 E\left[\prob{P$_{KDE}$}{\vec{x}}\right] \prob{P}{\vec{x}} + \prob{P}{\vec{x}}^2$
- Add and subtract $E^2\left[ \prob{P$_{KDE}$}{\vec{x}} \right]$
- \begin{align} = & E^2\left[ \prob{P$_{KDE}$}{\vec{x}} \right] - 2 E\left[\prob{P$_{KDE}$}{\vec{x}}\right] \prob{P}{\vec{x}} + \prob{P}{\vec{x}}^2 \\ & + E\left[ \prob{P$_{KDE}$}{\vec{x}}^2\right] - E^2\left[ \prob{P$_{KDE}$}{\vec{x}} \right] \end{align}
- \begin{align} = & (E\left[ \prob{P$_{KDE}$}{\vec{x}} \right] - \prob{P}{\vec{x}})^2 + E\left[ \prob{P$_{KDE}$}{\vec{x}}^2\right] - E^2\left[ \prob{P$_{KDE}$}{\vec{x}} \right] \end{align}
- This is an example of bias-variance tradeoff
Bias-variance tradeoff (digression)
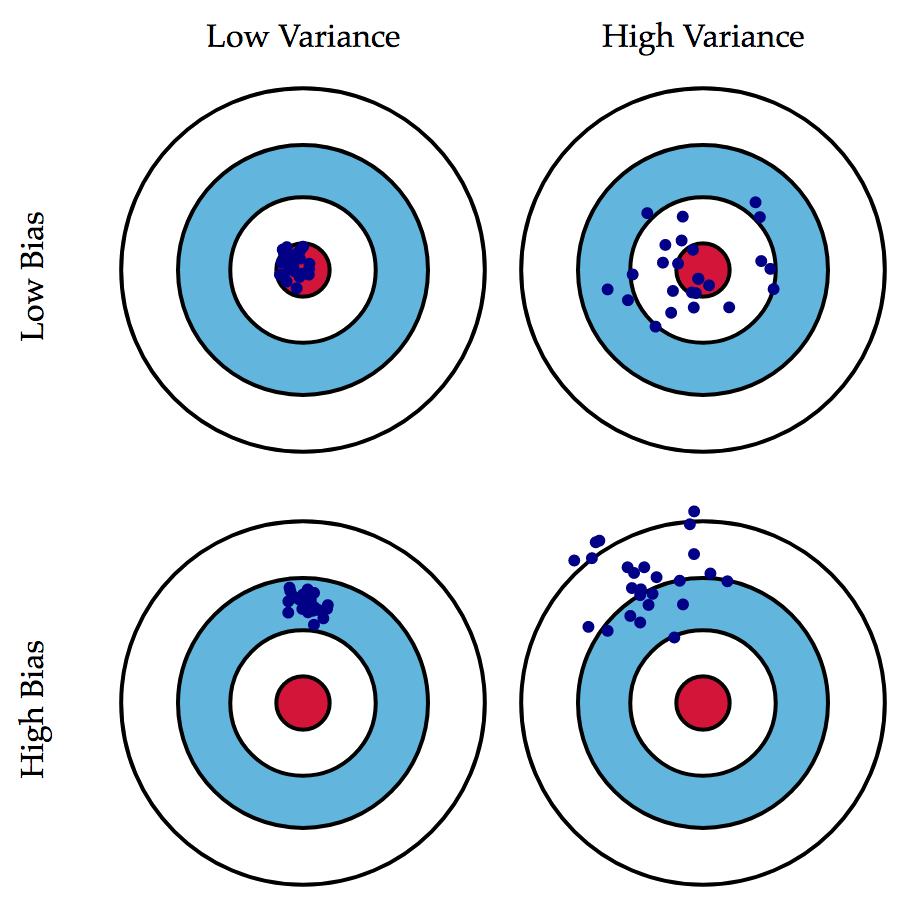
Bias-variance tradeoff (digression)
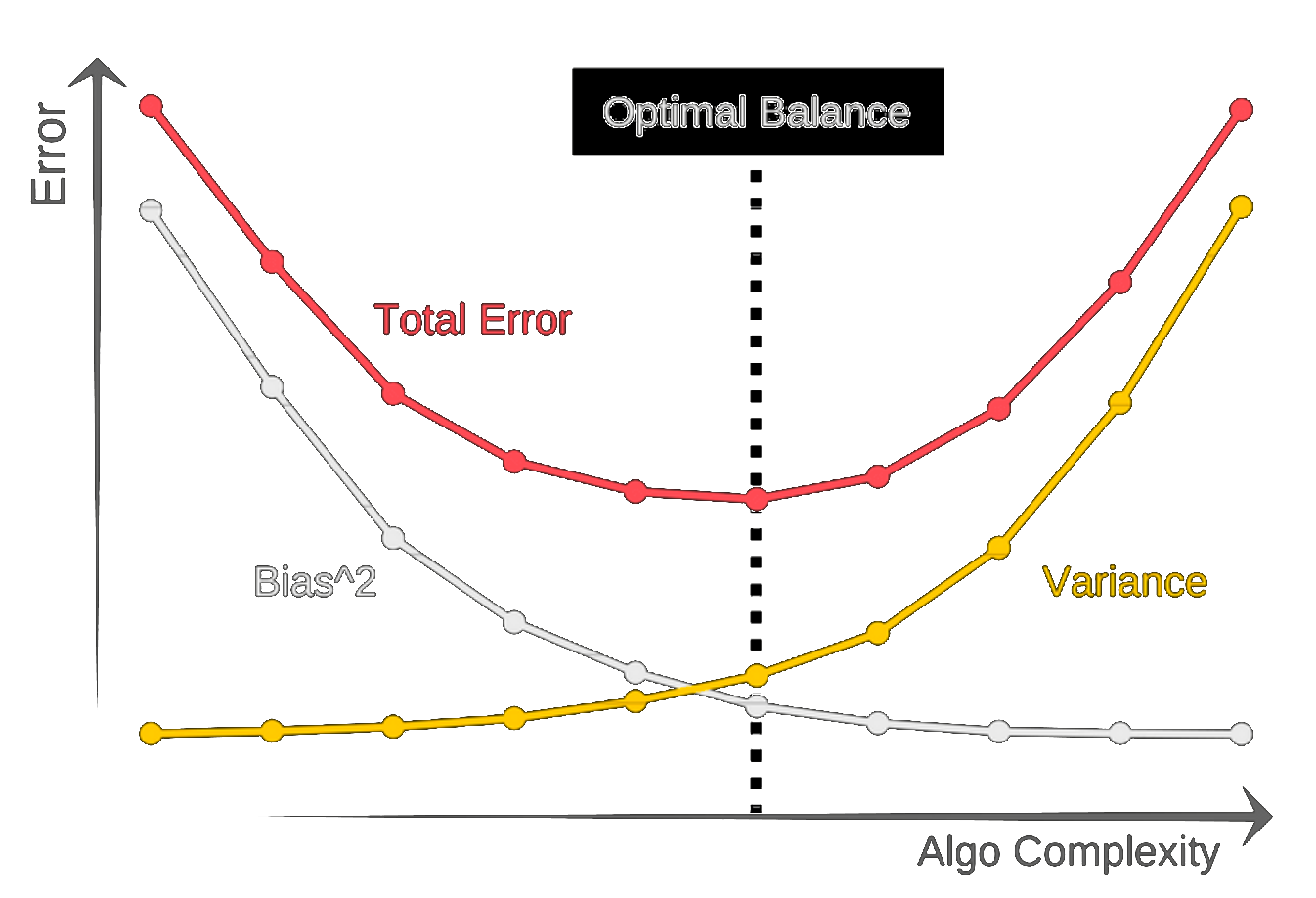
Bias-variance tradeoff (digression)


bandwidth selection
Subjective choice
- Plot out several curves and choose the estimate that best matches your subjective ideas
- Not too practical for high-dimensional data
Assuming everything is Normal
- Minimize the overall MSE $ h = \argmin \{ E\left[ \int (\prob{P$_{KDE}$}{\vec{x}} - \prob{P}{\vec{x}})^2 d\vec{x} \right]\} $
- Assuming the true distribution is Gaussian $ h^* = 1.06\sigma N^{-\frac{1}{5}} $
- Can obtain better results with $$ h^* = 0.9A N^{-\frac{1}{5}} \mbox{ where } A = \min(\sigma, \frac{IQR}{1.34}) $$
Multivariate density estimation
Things to watch out for
- $h$ is the same for all the axes, so this density estimate is weighting all axes equally
- A problem if one or several of the features has larger spread than the others
A couple of "hacks" to fix this
- Pre-scaling each axis (e.g. to unit variance)
- Pre-whitening the data
- Whiten the data $\vec{y}=\Lambda^{-1/2}V^T\vec{x}$
- Estimate the density
- Transform everything back
- Equivalent to hyper-ellipsoidal kernel
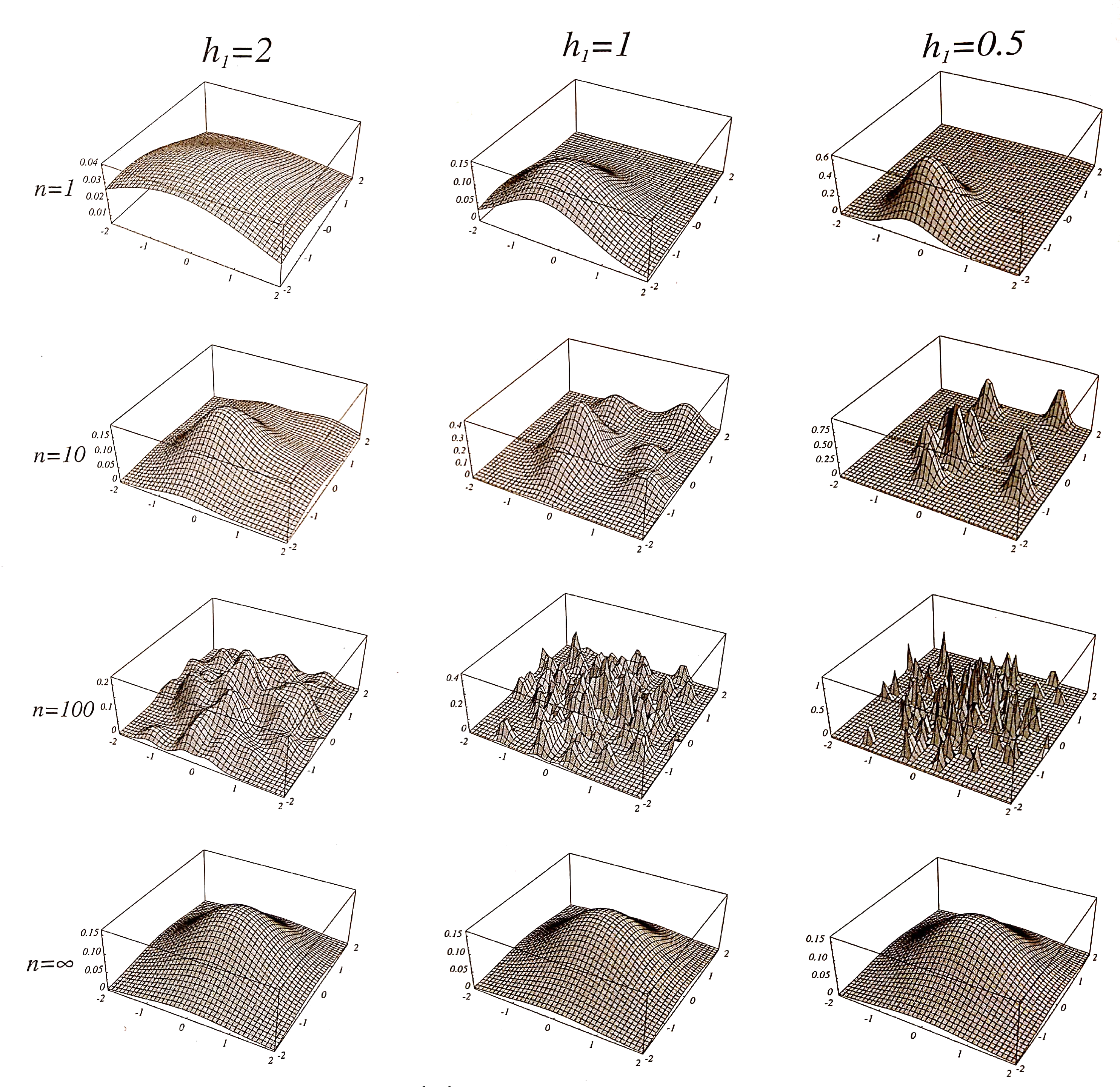
Product kernels
Use it if "hacky" solutions are not your thing
- $\prob{P$_{KDE}$}{\vec{x}} = \frac{1}{N} \sum_{i=1}^N \prob{K}{\vec{x}, \vec{x}^i, h_1, \dots, h_d}$
- $\prob{K}{\vec{x}, \vec{x}^i, h_1, \dots, h_d} = \frac{1}{h_1h_2\dots h_d} \prod_{j=1}^d \prob{K}{\frac{x_j-x_j^i}{h_j}} $
- Consists of the product of one-dimensional kernels
- Note, kernel independence does not imply feature independence
Unimodal distribution KDE
- 100 data points were drawn from the distribution
- True density (left), the estimates using $h=1.06\sigma N^{-1/5}$ (middle) and $h=0.9A N^{-1/5}$ (right)

bimodal distribution KDE
- 100 data points were drawn from the distribution
- True density (left), the estimates using $h=1.06\sigma N^{-1/5}$ (middle) and $h=0.9A N^{-1/5}$ (right)